Autonomous ROVER Drive Unit (VANDERBILT ROBOTICS, 2022-2023)

Problem:
The previous drive unit was too heavy and excess backlash reduced the lifespan and efficiency of the drive train
Challenges:
Removing backlash without adding complexity
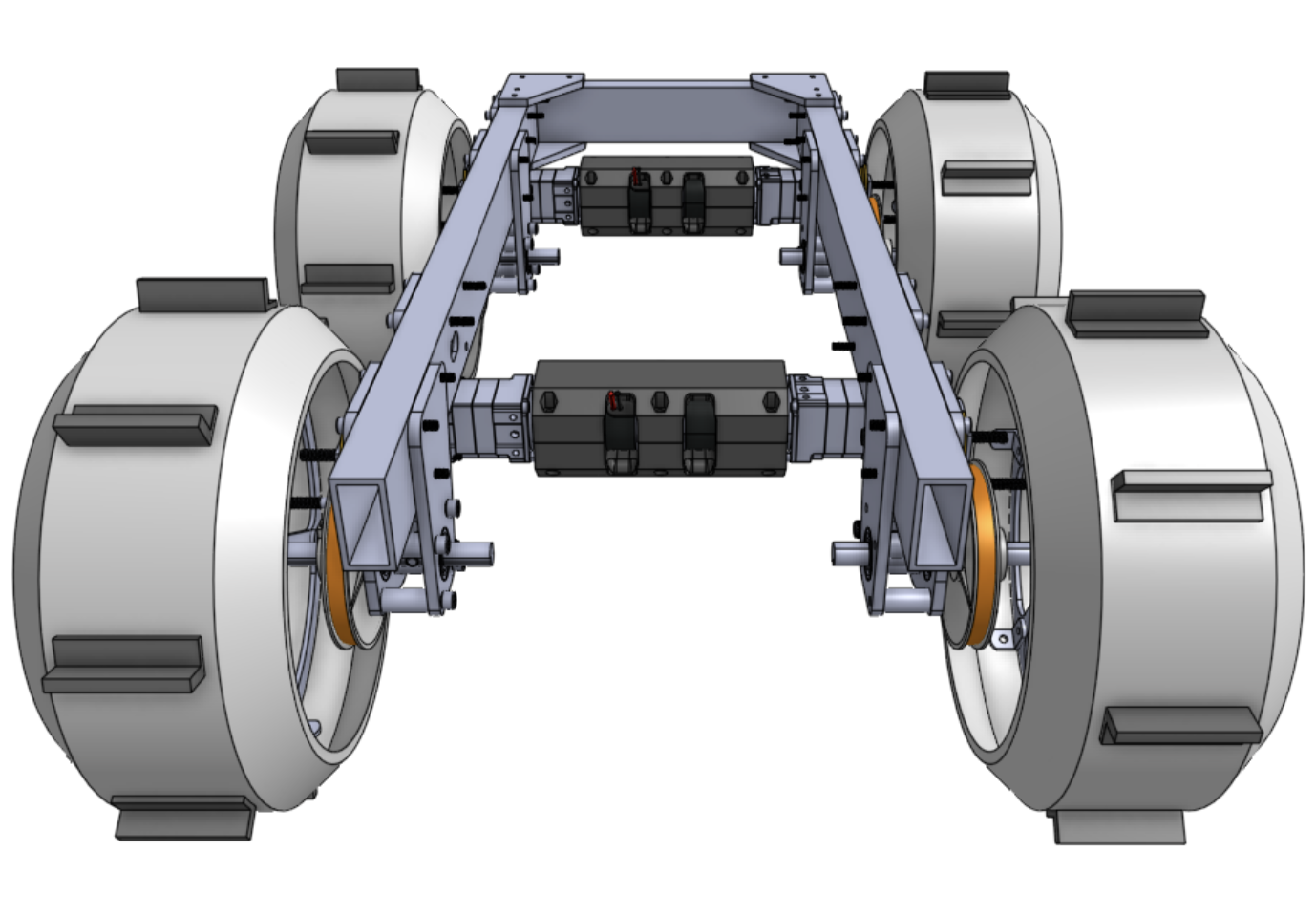
Making the drive unit into a sub-assembly independent of the frame assembly
Results:
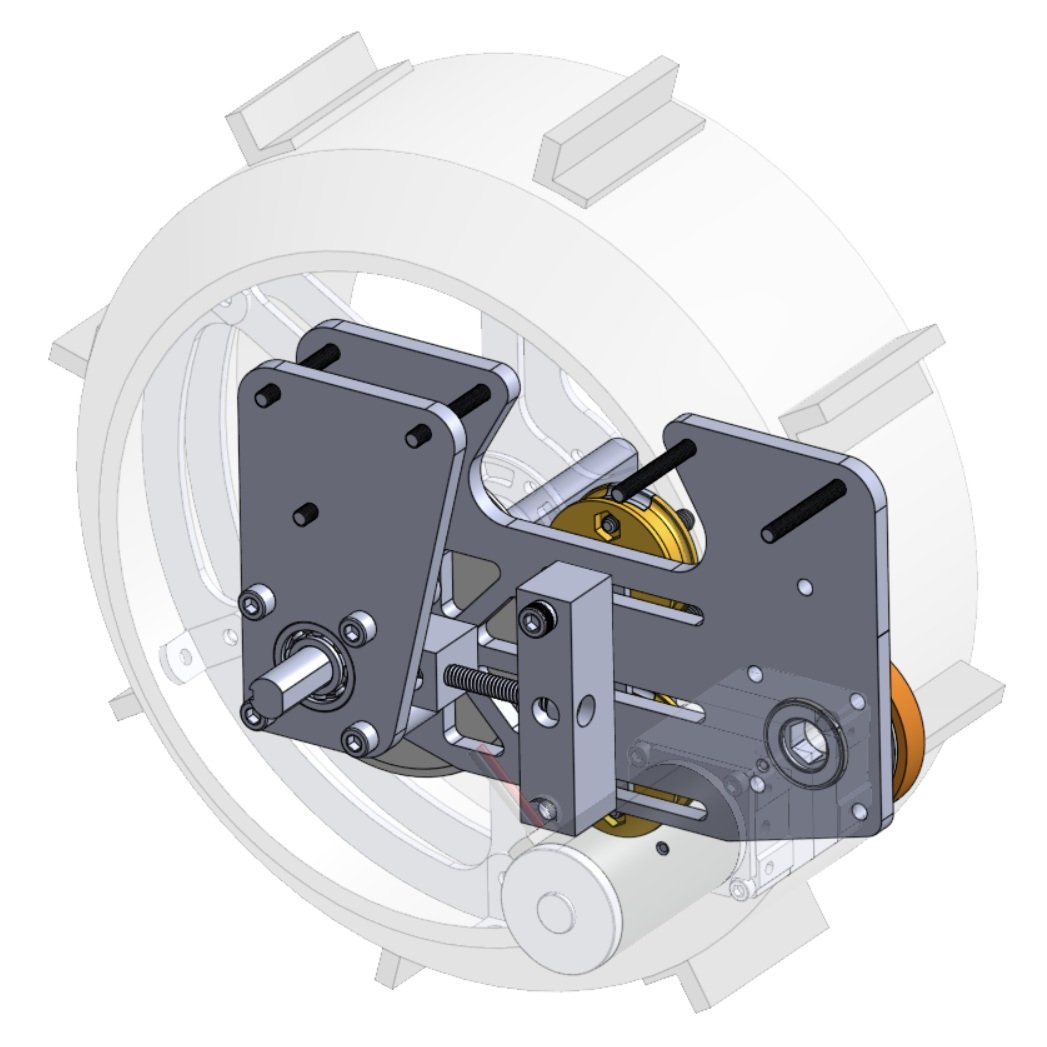
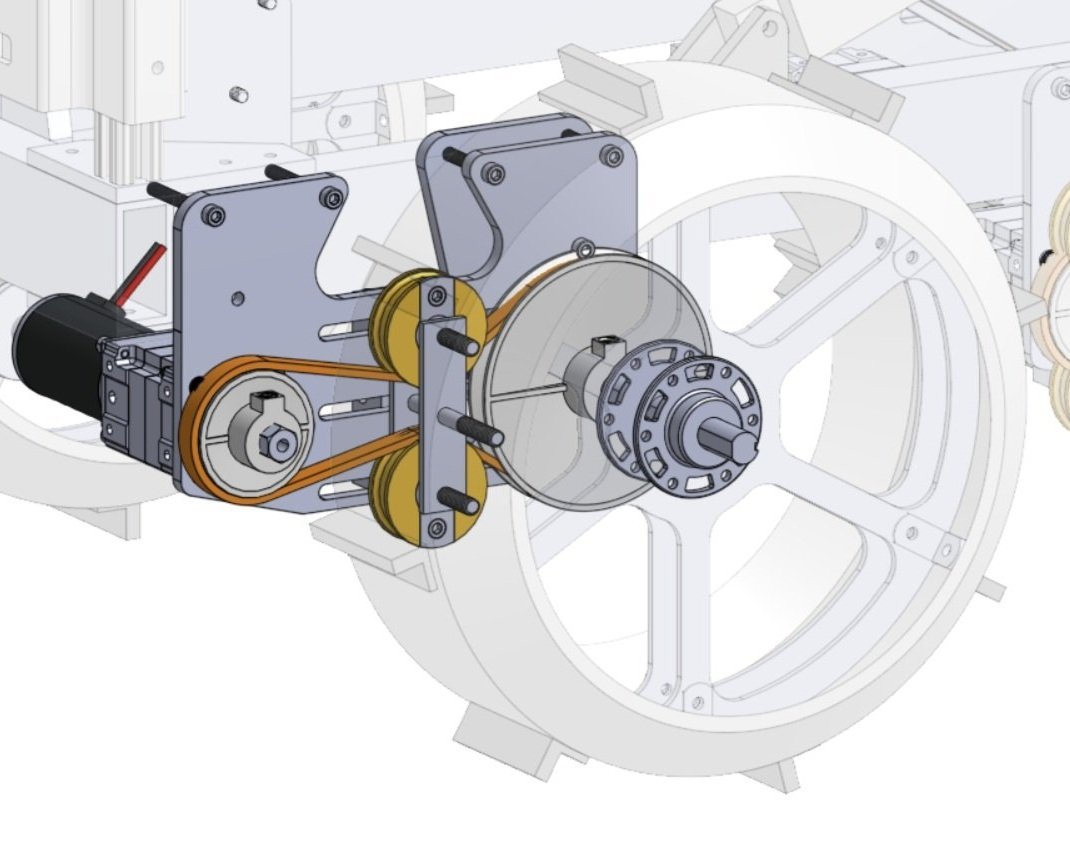
Designed and machined (CNC, hand mill) a self-contained belt driven drive unit and tensioner
Low backlash of belt drive allowed for the removal of suspension, saving 2.5kg per drive unit