Pick and Place/Nut Driver End Effector (NISSAN AMERICA, 2024-ONGOING)



Through a project facilitated by Vanderbilt University, four classmates and I have been collaborating with Nissan to automate a subassembly process.
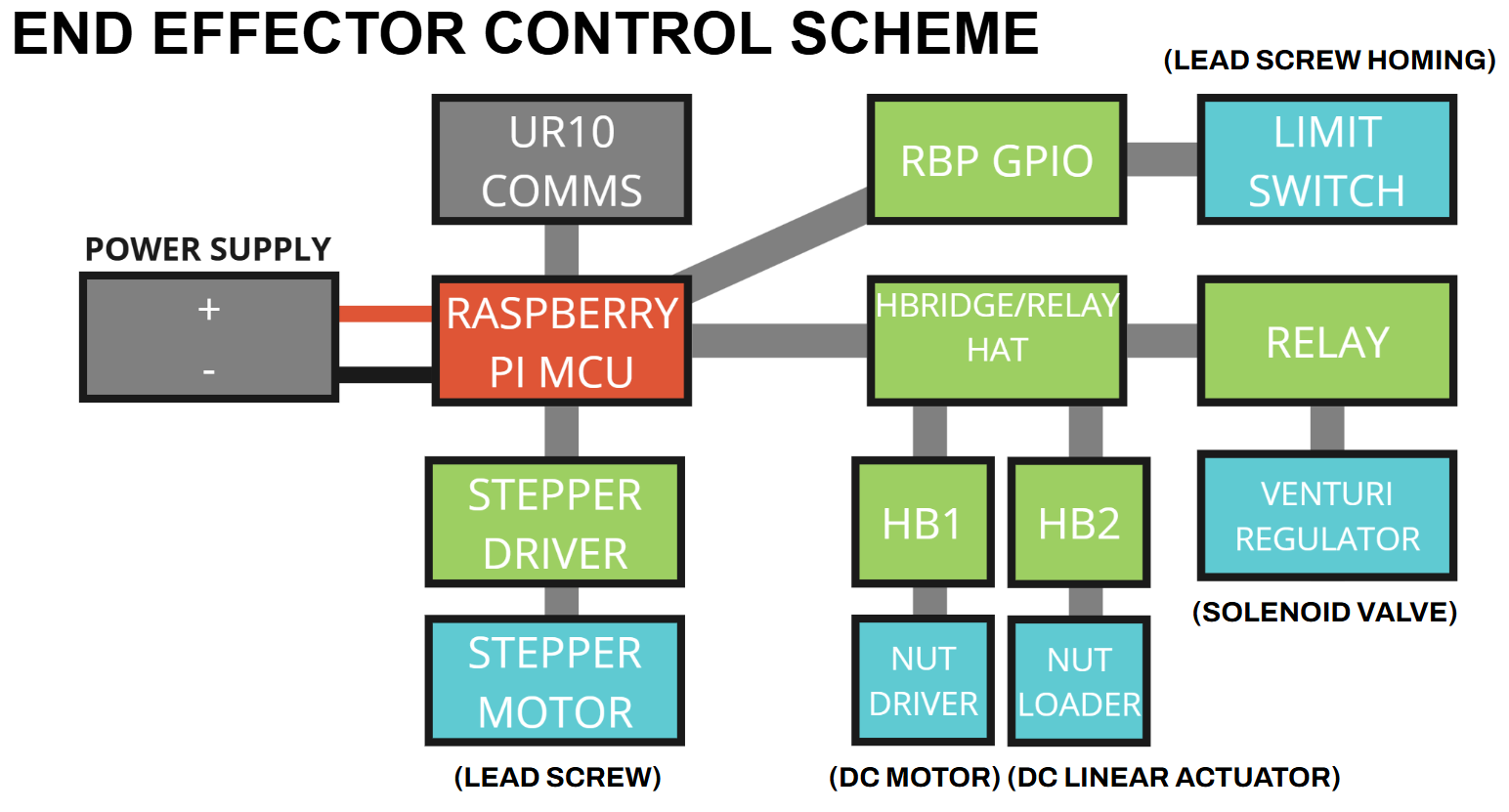
I have primarily been responsible for designing this end effector to be mounted to the end of a 6-Axis UR10 Robot.
Full sheet metal design
Venturi pump used for “pick and place” suction cup head
Blowfeed delivery system transports nuts to end effector
Nut driver mounted on linear actuator to load nuts into socket head